
Electric Vehicle Project
Yea, after seeing 'Who Killed the Electric Car', and after having worked on a plug-in hybrid vehicle maybe 15 years ago, I thought I'd start working on one. So far, most things are at the early design stages, but it's getting there. I actually thought about doing this several times but the movie (especially Chelsea Sexton - probably my favorite actress) convinced me that I should re-visit this. Also, after learning how to build microphones, I need a new project to work on.
A few things you need to do early is come up with a vehicle choice.... A Saturn SC is a rather attractive option. I started with the idea of a CRX... then I looked at a few. They have rust issues. The Saturn does not appear to, and it is quite light. I would like a car that starts off less than 1000 kg curb weight. A quick trip to the junkyard gets GVWR, and the internet can get curb weight pretty easily. Which leads to battery selection....
The commonly-available 'nice' batteries include Lithium, NiMH or NiCd. NiCd cells have been used a lot in EV projects, and using them makes a lot of sense. For the same price, though, you can get 48-volt NiMH packs at about 12 Ah capacity. These are using 'small format' NiMH cells so they don't invoke the wrath of one of the oil companies, who now own patents on wet-cell NiMH batteries for traction applications. Conspiracy or not, I didn't want to go there. I would like an electric range of 120 km, which is equivalent to my older Chevrolet Caprice Classic when it was running on CNG. Uve's calculator indicate that about a 12 kW*h battery would be sufficient, but 14 kW*h gives a bit of margin. Also, the electric Ford Escort HEV that I am familiar with - using a 12 kW*h battery pack managed to consistently get 70 km - and it weighed about 1600 kg. I expect the CRX conversion to tip the scale at about 900 kg - and its Cd*A value is significantly less than an Escort wagon. The weight of the Escort battery pack was somewhere around 350 kg, and I expect a weight of around 200 kg for the same capacity. Cost of battery - probably around $10,000. Ouch!!! Lithium batteries come in at a similar cost range, but are considerably lighter. I dunno....
Well, one thing to consider is cost and time to get going. One option I am entertaining is building the car around the Exide 34XCD battery (12 of them), and if the range is good enough for now, great. The only advantage of that is getting going earlier. The capacity will be about 7.5 kW*h - half of what I'd like - but the cost is somewhere around $2000. That's a lot easier to swallow. Uve's calculator shows a range of 85 to 90km, but that's being optimistic. I expect somewhere around 55 or 60 km. In my opinion, individual battery monitoring is not optional. That is included in here. There needs to be a way to prevent reversed cells in the pack as that will permanently damage them. A couple of the Deka batteries look interesting, too. The 8G34D or 8G24 might be promising. Gel batteries don't excel in high current conditions, but cycle life is significantly better than AGM's. By using IGBT's in the drive module (see below), a higher battery voltage can be used than the motors actually need, so adding range in blocks of single batteries is possible.
The motors, I get a bit of a break. This is what I got initially....
And I've worked on it a bit...
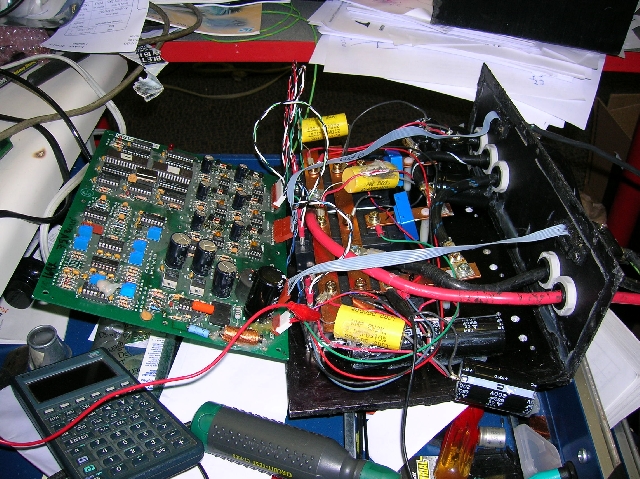
Those are two Solectria BRLS-16 motors, and the guts of a BRLS-240H controller. The old MOSFET's are all gone (blown up), and many parts of the controller PC board have been toasted convincingly as well. The Solectria motors are fine, and I suspect the controllers are fine if cared for. But this controller wasn't, and with it, some carnage. The IRFK6H250 MOSFET modules used in here are no longer available - and expensive if you can find someone who still has a few. So I need to come up with a replacement. That replacement, for this motor, is the FMG2G300US60E dual IGBT module.
I have been looking at building a new controller using a dsPIC30F4012 or an MC9S12E128, and HCPL-316 optocoupler and MOSFET drivers, and I may do that some day. It should be possible to design a new controller to run either a BLDC or AC induction motor. Some of the newer AC induction motors are capable of very reasonable power outputs and reasonable weights - almost as light as these Solectrias. The Unique Mobiltiy motors shine in this regard - they are very impressive in terms of power density.
By taking the same power stage I would like to use for my own controller (the FMG2G300US60E), and some slight modifications to the original Solectria control board, I can get this thing running quickly. The modifications include changing the overvoltage protection threshold to 200V or so (from 150V), and changing the turn-off and turn-on gate resistors. In fact, yesterday (2007-01-18), I got the controller working in this manner. I've spent a bit of time getting things ready, and now all I am having to wait for are the nice IGBT snubber capacitors. These are 4.7uF, 600V, low-inductance capacitors meant for IGBT modules. Additionally, bulk capacitor storage using 350 or 400V electrolytics will be added.
The original Solectria controller has an interesting architecture. It was implemented as a synchronous state machine, with analogue multivibrators to time turn-on, turn-off, braking PWM frequency, and motor stop detection. Also, a pair of comparators is used to generate a substantially constant ripple current waveform. By doing a few tweaks to the multivibrator time constants, I can get what I think should work a bit better with the IGBT's. I'm looking at a small state machine modification to perform timing advance with speed and load. Primarily with speed, the current takes a while to build up. The bus voltage - motor back-EMF creates the voltage difference required to force the current to rise to the setpoint. The motor inductance works against this. If there is enough time delay, there is an advantage of advancing the timing with speed. I am going to look into this. Ideally, the current should reach the setpoint to maintain a 90 degree pull on the rotor. Either the motor could be timed early, to optimize top-end power, or timed late, with better low-end torque. An internal combustion engine has timing advance built into it, and it's not particularly difficult to implement. In terms of what I need to do - intercepting the hall-effect inputs is one option, using a larger EPROM is another. I will need to check if a commutation change results in a restart of the PWM sequence. If it does not, then it should.
The Solectrias have been sitting for a while, so new bearings are called for. The old ones are somewhat trashed, actually. I have replaced them with high-RPM, motor-grade bearings. The originals were standard NSK 6007Z's.
A Kilovac EV200 contactor, shunt, and a current meter will be added next. I've got some ideas for the battery voltage monitor system and current gauge. Linear Tech has some nice A-D converters and gas gauge IC's. Adding those to a simple HC908 of some kind oughtta do the trick. I want to use the MC68HC908AZ60, since it has CAN bus, and I already have some software ready for it.
I am planning on starting with one of the motors, but also expecting to put both motors in place for performance reasons.... I don't really want a lethargic car. This one had better move. Both of these Solectria motors together will out-pull the original Honda CRX motor - and it's no slouch to start with. But then again, one motor will be a lot easier to mount and I should get acceptable range that way.
I am looking at designing two charging systems. One is a small non-isolated (I might do isolated but it depends if I can get a transformer wound for it), GFI-equipped, power factor corrected, low-power charger - maybe 1000 or 1500 watts. This will be used for opportunity charging. I think that non-isolated would be ok, but I would prefer isolated. Non-isolated is quite a bit lighter, and that's an advantage here. Anyways, I expect a weight of only a few kilograms. I expect that the 'large' charger may actually be a bank of smaller battery chargers configured to charge each battery individually. Possibly the Xantrex switching battery chargers would be good here - ones appear on ebay for around $250. The programming of these chargers may need to be modified somewhat for best charging of these batteries. With proper high-current charging, battery life in deep-discharge has been increased to 600 or 700 cycles at 80%DOD instead of the usual 300 cycles at the same DOD (depth of discharge). This was tested with the Optima Yellow-Tops, but I'll hazard a guess that the Exides would respond the same way. This means the charging connector needs some thought as each battery needs to be brought out individually. The advantage of this is that my normal 'charging' method should keep the cells balanced without needing on-board cell regulators or that sort of thing. One possibility is to have Amphenol military-style connectors, but perhaps two or three of them to bring out each battery on its own pin. It may be possible to charge, say, four batteries at once, then switch all four chargers to the next set of batteries, etc. Another lower-cost option is to have a fully on-board system. A bulk charger can charge the entire battery pack, and a single smaller charger can be used to balance the batteries by adding current to the lowest-voltage battery in the string.
My commute in my VW GTI (1.8T) takes about 3.4 kW*h at engine output shaft to get me to work and back, driving the way I usually do (which is quite gentle but not crawling). That's with soft winter tyres. A low rolling resistance tyre and better aerodynamics would go a ways in reducing that, I suspect. With a motor and controller efficiency of around 90%, I'd be at about 50% DOD on the Exide battery pack.
That's just a quick snapshot......
Approximate budget:
$700 for motor drive semiconductors and other bits and pieces (already obtained)
$200 for printed circuit boards - instrumentation, battery chargers.
$2400 for batteries (12 Exide 34XCD or Deka 8G34D)
$500 for misc wiring, fuses, contactor, DC power supply.
$1000 for glider vehicle
$1500 for low rolling resistance tires, rims, new brakes, new wheel bearings, transmission seal replacement.
$50 for semiconductors and enclosure for the opportunity charger (already obtained)
I need to work on some of the details for the parallel charger system. I can get PWM battery chargers from Canadian Tire for a reasonable price. A set of 12 of these chargers should be sufficient for this. These will be off-board, in my garage.
It seems like spending that amount of money seems a bit much.... but it should be fun. Anyways, the total cost looks to be around $6500. Reasonable, I suppose. But do I want to do that at this time? Maybe or maybe not....??? I have already purchased the motor drive electronics so I can either rebuild the motor controllers and sell the motor/controller packages or build something with it.
Now, should I do this or is it just a neat thought exercise? I don't know but you can let me know what you think at mailto:dale@10000cows.com
As of the fall of 2009, I've not been working on this much, but I'd like to do a project. I'm patiently waiting for a suitable donor car... here are some ideas:
Saturn SC
Older Fiat 500
One of those three-wheeled motorbike-looking things
Mazda MX3
Mazda MX5 (Miata)
Smart fortwo, find one with a blown-up engine?
I actually like the idea of one of those three-wheelers, if for no other reason than the sound of the electric one will be almost nothing when compared to the racket usually made. And I don't like the idea of having to balance a bike with a big battery pack.
Oh, my new EV project..... will probably be to purchase one. I'd love a Tesla, but I'll settle for the very cool, very practical, Nissan Leaf. It appears to have many of the features that I like - hatchback, good range - with an electric drivetrain, and about a 160km range (when new). I could see a 'range boost' extra battery pack option becoming available sometime.